|
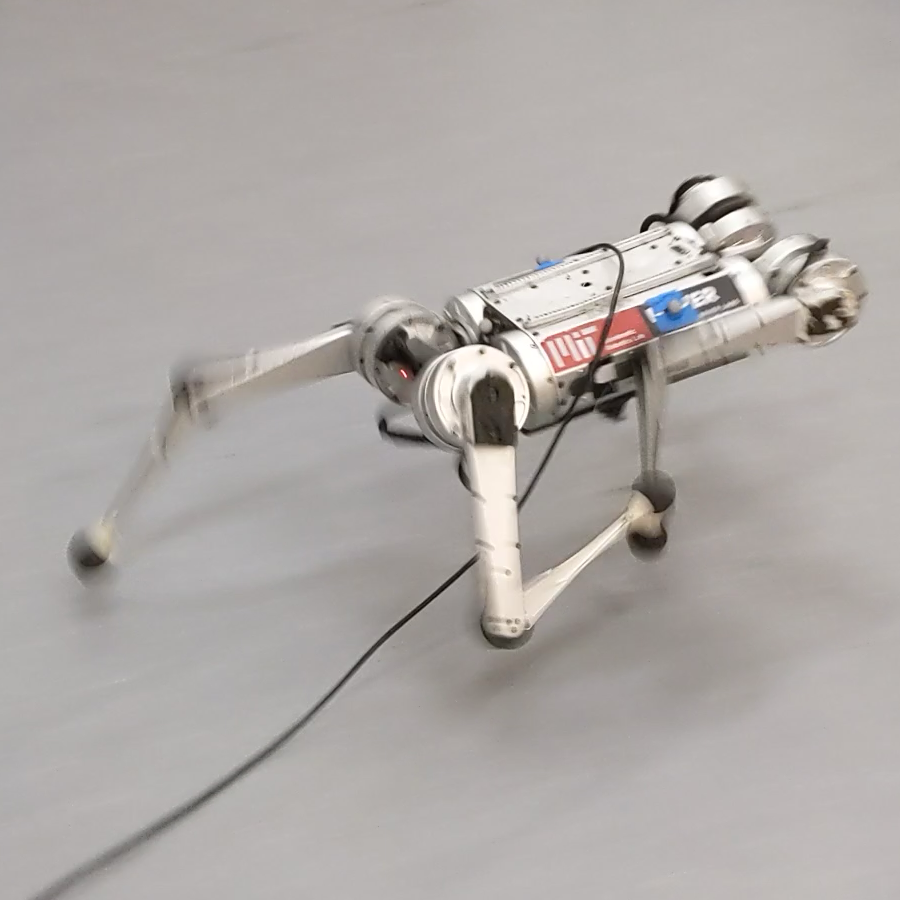
I am a Machine Learning Engineer at Tenstorrent Inc. working on a new generation AI compute. Previously, I have worked at Verdant Robotics, Luminosity Labs and IISc Bangalore where I had a chance to work with Dr. Gabe Sibley, Tyler Smith, Prof. Shishir Kolathaya and Prof. Shalabh Bhatnagar. My area of interests includes reinforcement learning, deep learning and robotics. I finished my Master's degree from ASU with a specialization in Robotics and AI. During my graduation, I did research on agile sim-to-real locomotion in collaboration with Improbable AI Lab, MIT advised by Prof. Pulkit Agrawal. I had a fun time working on Mini-Cheetah robot, making it run faster and jump over large gaps. I received my bachelor’s degree in Computer Science from Visvesvaraya National Institute of Technology (VNIT), India in September 2019. I was an undergraduate summer research fellow at AIRLab, Politecnico di Milano, Italy advised by Prof. Andrea Bonarini and Dr. Davide Tateo. I worked on inverse reinforcement learning and dimensionality reduction for a search and rescue robotics task. During my bachelors, I was one of the core-coordinators of IvLabs, the robotics lab at VNIT where I spent most of the days and nights learning and teaching robotics. |

|
|
|
|
I work on efficient ways an AI agent, robots or a silicon can be trained and learn important interactions with the physical world. |
|
Gabriel Margolis*, Ge Yang*, Kartik Paigwar, Tao Chen, Pulkit Agrawal Preprint, 2022 paper (coming soon) / project page High-speed running and spinning on diverse terrains with a single neural network. |

|
Gabriel Margolis, Tao Chen, Kartik Paigwar, Xiang Fu, Donghyun Kim, Sangbae Kim, Pulkit Agrawal CoRL, 2021 Press Coverage: MIT News paper / bibtex / project page A hierarchical control framework for dynamic vision-aware locomotion. |
|
Kartik Paigwar, Lokesh Krishna, Sashank Tirumala, Naman khetan, Aditya Sagi, Ashish Joglekar, Shalabh Bhatnagar, Ashitava Ghosal, Bharadwaj Amrutur, Shishir Kolathaya 4th Conference on Robot Learning (CoRL 2020), MIT, USA arXiv / project page / github / video / slides What is the minimum possible control framework that can be deployed to realize stable locomotion behaviors on slopped terrains in medium-size low-cost quadruped robots? |
|
Sashank Tirumala, Sagar Gubbi, Kartik Paigwar, Aditya Sagi, Ashish Joglekar, Shalabh Bhatnagar, Ashitava Ghosal, Bharadwaj Amrutur, Shishir Kolathaya 29th International Conference on Robot and Human Interactive Communication (RO-MAN 2020), Naples, Italy arXiv / project page / github / video Generating stable foot trajectories for Omni-directional quadruped motion and learning smooth transitions between these trajectories using expert demonstration. |
|
Sashank Tirumala, Aditya Sagi, Kartik Paigwar, Ashish Joglekar, Shalabh Bhatnagar, Ashitava Ghosal, Bharadwaj Amrutur, Shishir Kolathaya arXiv, 2019 arXiv / github: coming soon / video With a view toward fast deployment of learned locomotion gaits in low-cost hardware, we generate a library of walking trajectories, namely, forward trot, backward trot, side-step, and turn in our custom-built quadruped robot, Stoch 2, using reinforcement learning. |
|
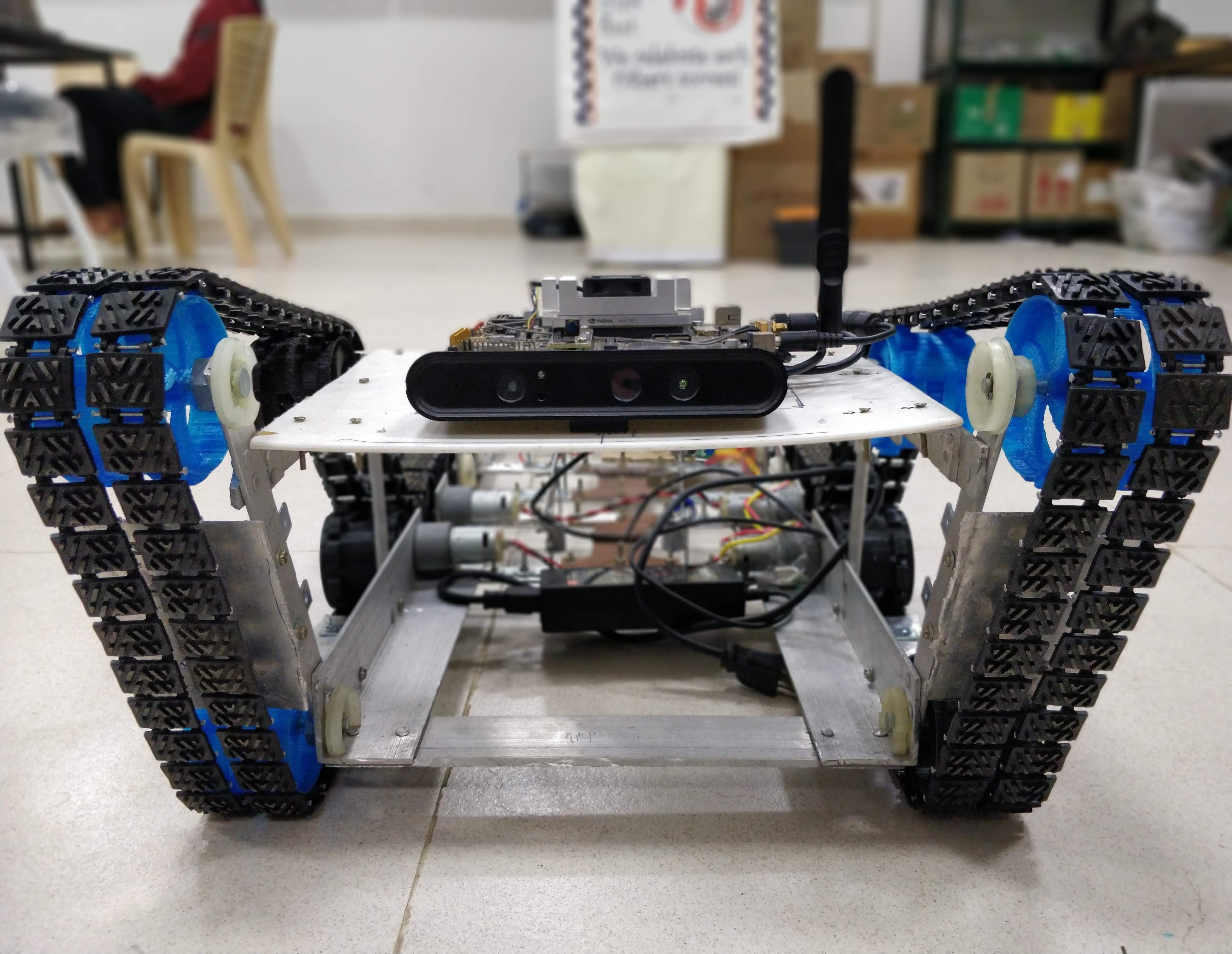
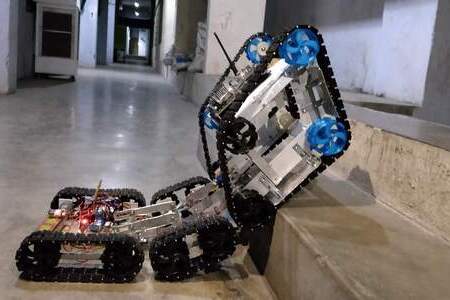
Unmesh Patil, Aniket Gujrathi, Akshay Kulkarni, Aman Jain, Lokeshkumar Malke, Radhika Tekade, Kartik Paigwar, Pradyumn Chaturvedi 3rd IEEE International Conference on Robotic Computing (IRC 2019), Naples, Italy publication / project page / github / dataset We present a deep learning based approach for stair detection, statistical filtering on images for the estimation of stair alignment, and novel mechanical design for an autonomous stair climbing robot. The primary objective is to solve the problem of indoor locomotion over staircases |
|
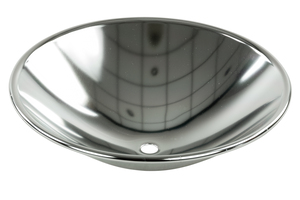
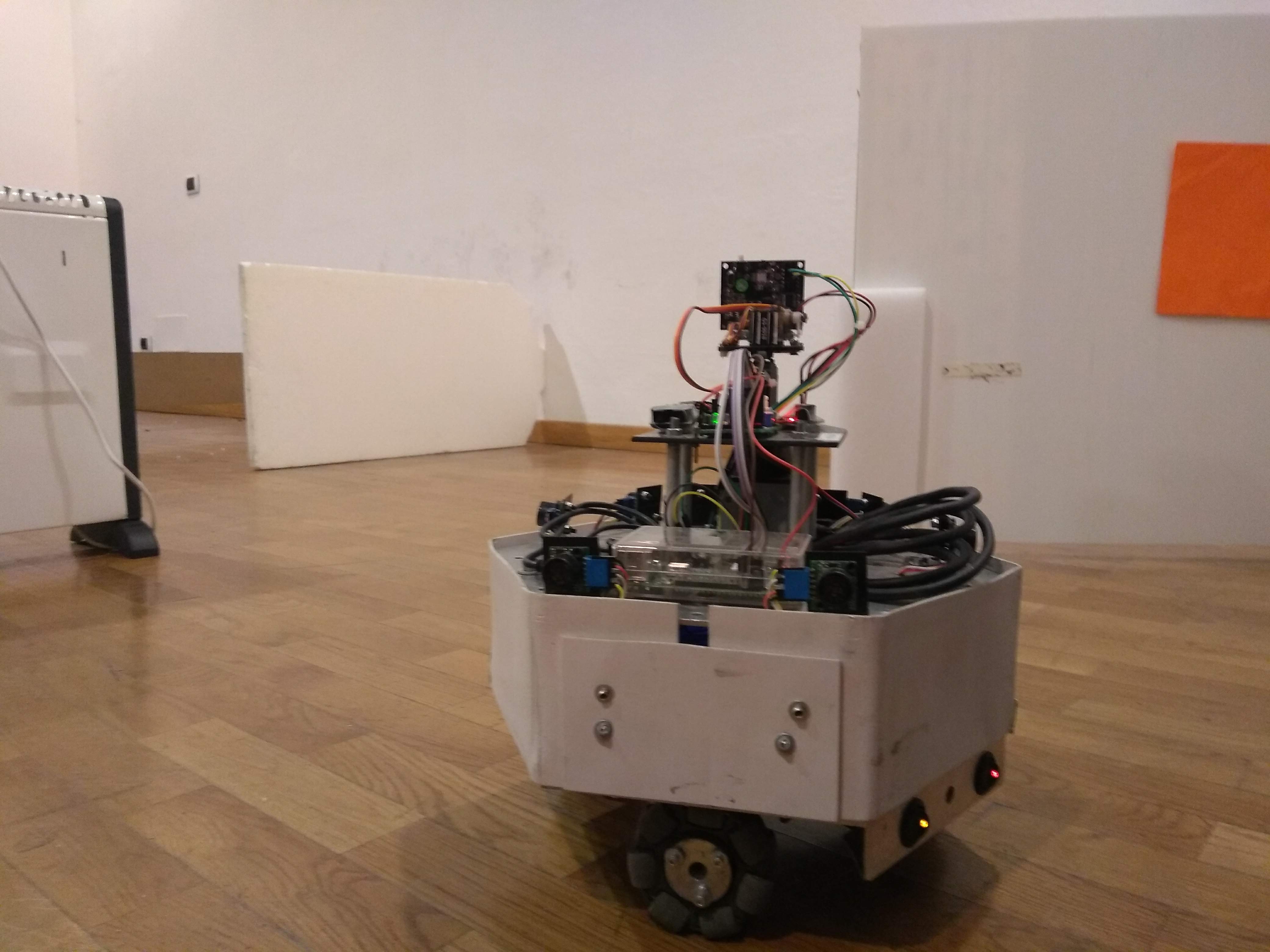
Yogesh Phalak, Gaurav Charpe, Kartik Paigwar International Conference on Robotics and Smart Manufacturing (RoSMa 2018), Chennai, India publication / video An omni-directional visual imaging system is constructed using a paraboloid reflector and a monocular camera as a cost effective on-board solution for mobile robot navigation. |
|
Kartik Paigwar, Sri Chandra, Purojit Chougule Bachelor Thesis, Computer Science Department, VNIT, Nagpur Supervisor : Prof. Meera Dhabu thesis / dataset / code / video A Deep RL framework for autonomous skills acquisition in which an agent learns from expert’s gameplays to exhibit a repertoire of skills in an adaptive game environment. |
|
Summer Internship, 2018 Worked on an inverse reinforcement learning problem to find a reward function which could explain the strategies incorporated for robot teleoperation during search and rescue missions. |
 
|
Kartik Paigwar, Kartik Patath, Prujocoject under Prof. Shital Chiddarwar at IvLabs, VNIT project page Networks can be trained to fuse mutliple images of a same scene with different focal settings and capture a fully focused image with a minimal specification smart phone camera. |
|
Project under Prof. Shital Chiddarwar at IvLabs, VNIT project page / github / video / Rubik's Cube Solver(RCS) is a complete program that can solve any scrambled 3X3X3 cube in less than 22 moves. It uses kociemba algorithm for finding the most optimum solution of a scrambled cube. |
|
|
|
Core-Coordinator, 2017 - 2019
Project Mentor, 2016 - 2019 |
|
|
Treasurer, 2018 |
|
|
Faculty |
Shalabh Bhatnagar (IISc), Ashitava Ghosal (IISc), Bharadwaj Amrutur (IISc), Shishir Kolathaya (IISc), Andrea Bonarini (PoliMi), Shital Chiddarwar (VNIT), Meera Dhabu (VNIT), |
Collaborators |
Aditya Sagi (IISc), Sasank Tirumala (IIT Madras), Pramod Pal (IISc), Lokesh Krishna (IIT BHU), Naman Khetan (ISM Dhanbad) |
Past Mentees |
Akshay Kulkarni (VAL Lab), Unmesh Patil (INRIA), Aniket Gujarati (RRC), Akshata Kamath (Manipal) |
|
Yes! You have guessed right. This guy has made a nice webpage. |